Games101-Homework2
本章内容
本章主要讲述Games101的作业2,涉及光栅化内容。
作业内容
- [5 分] 正确地提交所有必须的文件,且代码能够编译运行。
- [20 分] 正确实现三角形栅格化算法。
- [10 分] 正确测试点是否在三角形内。
- [10 分] 正确实现 z-buffer 算法, 将三角形按顺序画在屏幕上。
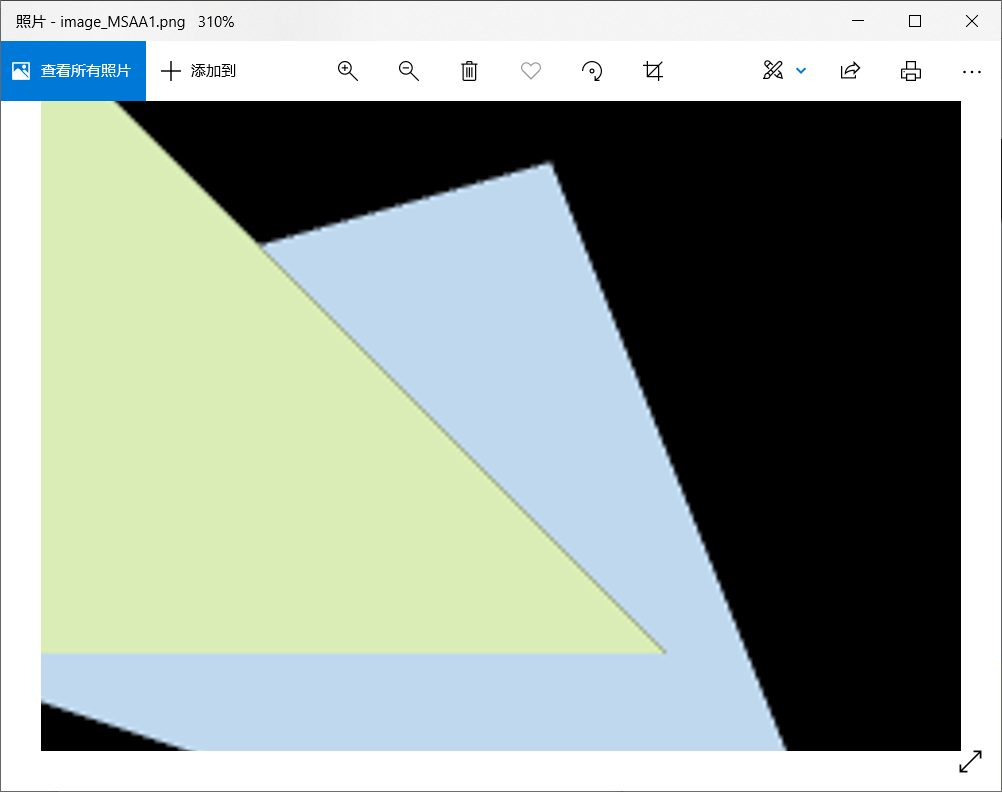
- [提高项 5 分] 用 super-sampling 处理 Anti-aliasing : 你可能会注意 到,当我们放大图像时,图像边缘会有锯齿感。我们可以用 super-sampling 来解决这个问题,即对每个像素进行 2 * 2 采样,并比较前后的结果 (这里 并不需要考虑像素与像素间的样本复用)。需要注意的点有,对于像素内的每 一个样本都需要维护它自己的深度值,即每一个像素都需要维护一个 sample list。最后,如果你实现正确的话,你得到的三角形不应该有不正常的黑边。
基础部分
实现
需要修改的函数如下:
- rasterize_triangle(): 执行三角形栅格化算法
- static bool insideTriangle(): 测试点是否在三角形内。你可以修改此函 数的定义,这意味着,你可以按照自己的方式更新返回类型或函数参数。
rasterize_triangle():
- 创建三角形的 2 维 bounding box。
- 遍历此 bounding box 内的所有像素(使用其整数索引)。然后,使用像素中 心的屏幕空间坐标来检查中心点是否在三角形内。
- 如果在内部,则将其位置处的插值深度值 (interpolated depth value) 与深度 缓冲区 (depth buffer) 中的相应值进行比较。
- 如果当前点更靠近相机,请设置像素颜色并更新深度缓冲区 (depth buffer),。
static bool insideTriangle():
- 作该点与三角形三个顶点的向量
- 按某个方向依次两两向量叉乘
- 判断上述3个叉乘结果是否同方向,若同方向说明点在三角形内,反之则在三角形外
代码
1 | //Screen space rasterization |
1 | static bool insideTriangle(int x, int y, const Vector3f* _v) |
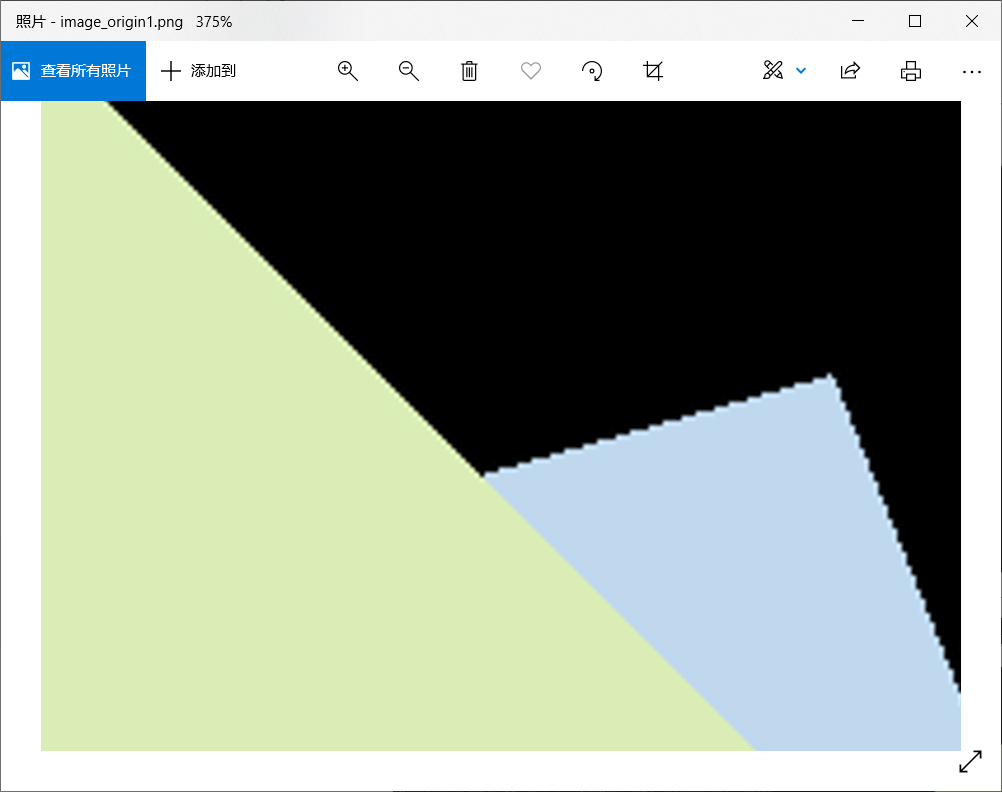
运行结果
放大图像后,很明显能感受到图像边缘有锯齿感。
提高部分
实现
代码
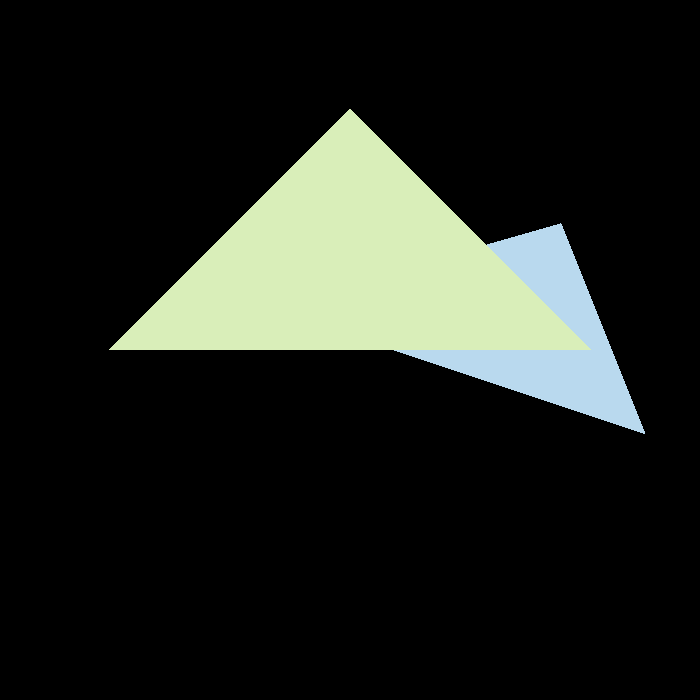
运行结果
不维护像素内每个样本的深度信息,有不正常的黑边显示。