Games202-Lecture3-4(Real-Time Shadows)学习笔记
本章内容
本章将讲述Real-Time Shadows(实时阴影)。
Shadow Mapping
一个2趟的算法
- 第一遍从光源所在地方渲染场景,记录从光源位置出发得到的场景中最浅深度,得到 Shadow Map
- 从相机位置出发,使用第一遍得到的深度(Shadow Map),来判断现在相机看到的位置是否在阴影里
一个完全在图像空间中的算法
- 优点:如果 Shadow Map 已经生成,可以作为场景的几何表示,只需要 Shadow Map即可
- 缺点:会导致自遮挡和走样(锯齿)
流程
详见 Games101-Lecture7-9(Shading)学习笔记
自遮挡
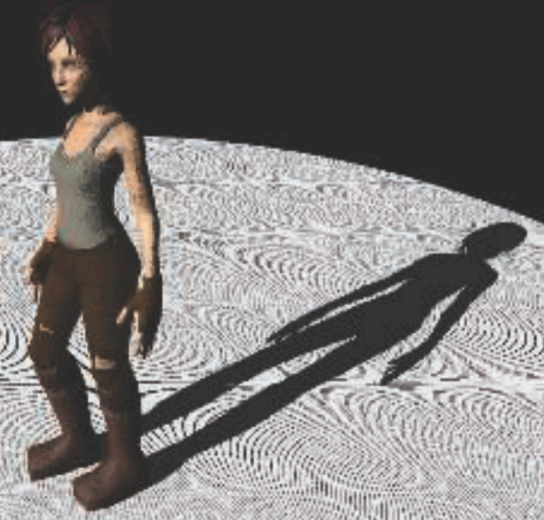
如图所示,地板上存在一圈一圈的纹路,这是由于数值精度造成的结果。
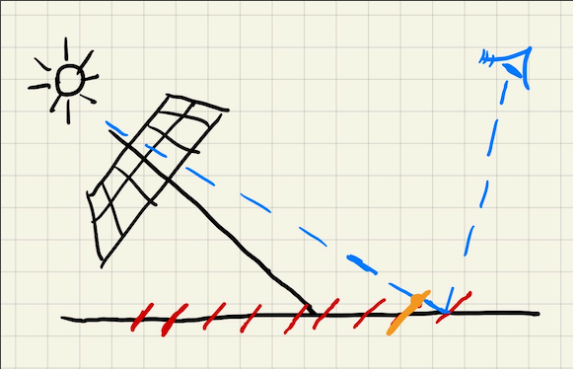
如图所示,从左上角光源看向场景,我们沿着某个像素看过去时,我们会认为在这个像素对应的场景区域内都是某个深度值,也就是图中的地板上的红线。
而后,对于最右边红线上的点,当相机指向它,我们将该点与光源连线,发现光源上记录该点的深度是连线上与橙线的交点,所以光源与相机记录的深度存在细微的区别,shadow
map 上记录的更浅,同时 shadow map 记录的深度是不连续的。
光源的角度比较偏的时候,造成的自遮挡现象会越为明显。
解决方法
- 添加一个可变的 bias 作为精度参数,如上图所示,可以将橙线和红线的距离作为 bias 值,当光源和相机观测同一点的距离相距为 bias 时,认为它们是同一位置。效果如下图所示。

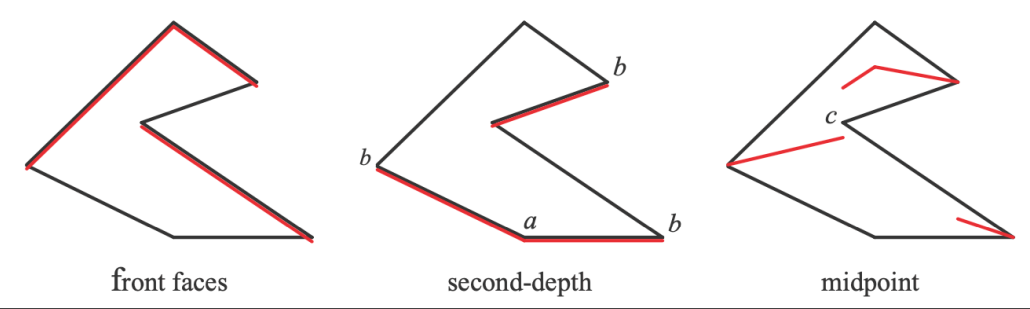
- 存最小深度和次小深度,使用中间深度作为阴影比较。实际上很少使用这种方法。
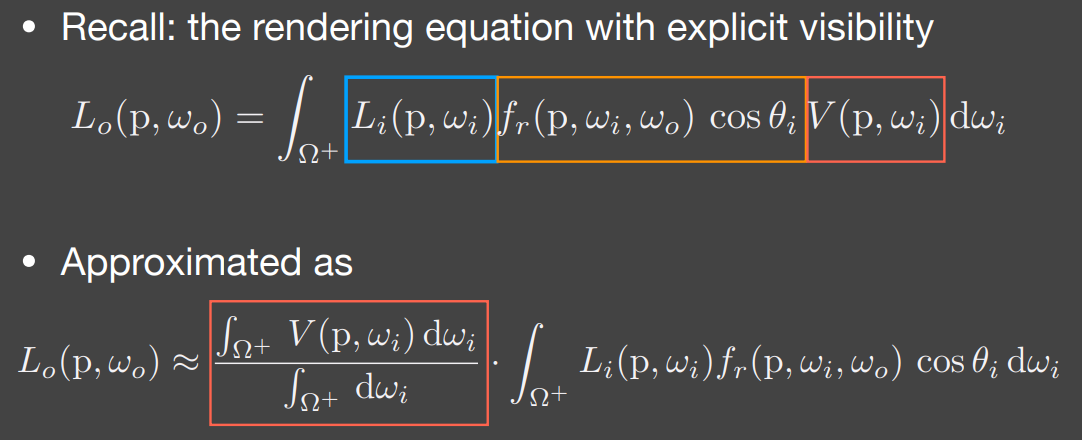
RTR 中的重要近似
\[ \int_\Omega f(x)g(x)dx \approx \frac{\int_\Omega f(x)dx}{\int_\Omega dx} * \int_\Omega g(x)dx \]
满足近似的 2 个条件:
- g(x) 的支撑集足够小(支撑集可以简单地理解为积分域上积分不为0的部分)
- g(x) 足够光滑
应用
- 对于点光源和方向光源,可以这样近似
- 漫反射和恒定辐射光照
Percentage Closer Filtering(PCF)
用于阴影边界的抗锯齿
实现
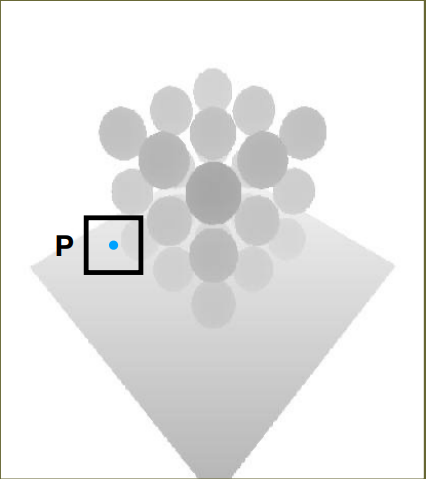
- 对每个像素点(如3 * 3)进行多次深度比较,如上图所示,对于p点,我们查询 shadow map 上该点周围3 * 3 的像素深度比较结果的平均。
- 获得平均结果,1 表示无遮挡,0 表示遮挡,如
1, 0, 1,
1, 0, 1,
1, 1, 0, - 获得是否遮挡的结果的平均,0.667(visibility)
关键结论
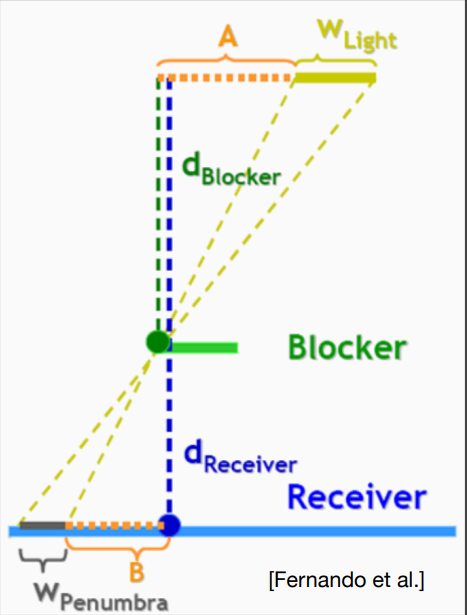 \[
w_{Penumbra} = (d_{Receiver} - d_{Blocker}) * w_{Light}/d_{Blocker}
\] 如上图所示,w 区域表示阴影软硬的程度,w
越大,阴影越软。由相似三角形可知,当 Blocker 离 Light 越近的时候,w
则会越大,阴影越软。
\[
w_{Penumbra} = (d_{Receiver} - d_{Blocker}) * w_{Light}/d_{Blocker}
\] 如上图所示,w 区域表示阴影软硬的程度,w
越大,阴影越软。由相似三角形可知,当 Blocker 离 Light 越近的时候,w
则会越大,阴影越软。
Percentage Closer Soft Shadows
类似上文的 PCF 做法,用于产生软阴影,核心是适应性的 filter size
- Blocker Search
获得 Blocker 区域内的平均深度 - Penumbra estimation
使用 Blocker 区域内的平均深度来计算 filter 大小 - 按 PCF 来计算
